QHY5とミニボーグ45ED-IIを使った私のガイドシステムは十分なガイド精度がありました。また、ほとんどの空でガイド星が見つけられました。ただ、ほとんどと言うことで、年に1,2回はガイド星を見つけられません。そのため、稀にイメージシフト装置を使っていました。そして、私にはガイド星探しを完全になくしたいという思いがあります。私はそれを実現するために下記の3つのことをやることにしました。
- 高感度なガイドカメラを使う
- 明るいガイド鏡を使う
- ガイド鏡の焦点距離を短くして広い範囲のガイド星を使う
単純に短焦点鏡を使用するとガイド精度が下がってしまいます。そこでMulti star Guidingを行います。普通のオートガイダーはガイドカメラがとらえた星の1つを使ってガイドしますが、Multi star Guidingは複数の星の重心の平均値でガイドします。これによって、短焦点鏡でも必要な精度を確保しようという考えです。この方法の利点はガイド精度向上の他にに以下の2点が考えられます。
- 広範囲のガイド星の平均を使うことで、シンチレーションの影響を少なくできる。
- 小さなガイド鏡で済むのでガイドシステムを軽量化できる。
今回は、限界に挑戦するつもりで焦点距離35mm F1.6と明るいCマウントレンズと高感度なQHY5L-IIの組み合わせにしました。このシステムのFOVppは約22.1秒角です。
FOVpp=206×3.75μm÷35mm≒22.1
私の撮影システムのFOVppは0.8秒角です。これをガイドするには0.018ピクセル即ち0.8÷2÷22.1のエラーを検知しなければなりません。Multi star Guidingで16個のガイド星の平均値を使えば、1個のガイド星を使うときよりも√16で4倍の精度が期待できます。9個でも√9で3倍ですね。既存のオートガイダーは1個のガイド星でも0.1ピクセルのエラー検知は余裕でできます。従って、9個使えば0.033ピクセル、16個使えば0.025ピクセルくらいのエラーは検知できるはずです。その余裕分で35mmならギリギリ使えるのではないかと考えました。
もし、50mmのガイド鏡を使えばFOVppは206×3.75÷50≒15.5になります。この場合、0.4÷15.5の0.026ピクセルのエラーを検知すればよいので16個のガイド星を使えばそれは余裕ですね。さらにもし、25mmのガイド鏡なら0.013ピクセルを検知する必要があり、途中の計算式は省きますが、60個のガイド星を使う必要がある計算になります。これは現実的ではありません。
と言うように、50mmなら安心、35mmは微妙、25mmは無理、と計算しました。既存のオートガイダーの余裕度が分からなかったので、限界に挑戦するつもりで35mmを選択したのです。
ちなみに、9個から16個にガイド星の数を増やせば精度が上がります。しかし、これを100個にすると演算量が多くなる割に精度向上が少なくなります。しかも、有効桁数も足りなくなるので16個くらいがリーズナブルな選択だと思います。
下記はUGC9749(赤緯67°)を撮影したときの約2時間分のガイドエラーの分布で、露光時間は5秒です。約90%が0.00~+0.06ピクセルの間に収まっています。角度でいうと0.0秒角~+1.3秒角で、振れ幅は1.3秒角です。
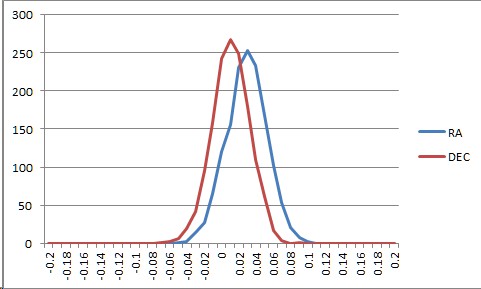
たった35mmのガイド鏡の割にちゃんとガイドしているように見えます。でも、欲しいガイド精度には少し達していないです。ミニボーグ45ED-IIとQHY5で実現できていた1秒角以内の振れ幅に抑えたいですね。ま、今回の結果が本システムの限界なのか、シンチレーションに揺さぶられた結果なのかは分からないので、もう少し様子を見ようと思います。
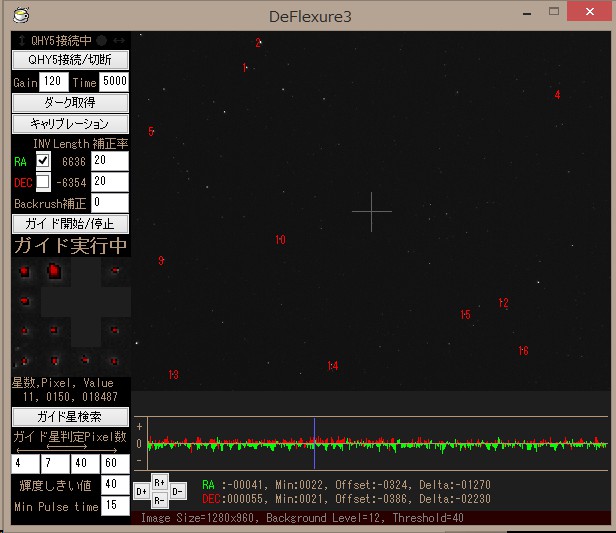
下の図は今回自作したMulti star Auto Guiderのスクリーンショットです。11個のガイド星を捉えています。このソフトウェアはDownloadページからダウンロードできます。